
Station-Keeping for Stratospheric Airships

Background and Motivation
A balloon or airship, floating in the stratosphere and providing communications or surveillance services to users on the ground, would be a boon to many users. Ideally, such a balloon or airship would remain where it was needed, high above normal aircraft operating altitudes. It would last a long time, and it would be zero-emission (the stratosphere is a pristine place). But, despite billions of dollars invested to-date, there are currently no high-altitude long-endurance airships capable of year-round station-keeping in the stratosphere. It is not for lack of trying…
Candidate Missions for a Stratospheric Airship
- High altitude base station for cellular access
- Radar surveillance of maritime traffic
- Compliance monitoring of fishing fleets
- Radio relay of safety messages for aircraft
- Radio relay for unmanned aircraft (UAVs)
- Platform for infrared astronomy
I have been thinking about this problem since 2009. At that time, I was VP and Chief Scientist at Insitu/Boeing. The US Navy had recently integrated our surveillance aircraft, the ScanEagle, along with its support systems, aboard the USS Bainbridge. Then, in April 2009, we were happy to be able to provide some assistance in rescuing Captain Phillips from Somali pirates.
After leaving Insitu later in 2009, I started thinking about ways to extend the operating range of the aircraft from its mother ship – for example, to perform long-range patrols out to hundreds of miles from the ship. While we could stay aloft for 24 hours, and could easily support a long-range patrol mission from an endurance standpoint, we were limited by line-of-sight and link budget considerations to less than 100 miles. And the aircraft was too small to carry a high-bandwidth satellite communication system. So I started thinking about high-altitude relays in the stratosphere, which would be useful for ScanEagle as well as many other unmanned aircraft. But stratospheric relay turns out to be a difficult problem. A free balloon will tend to drift away from where it is needed, and no one had ever commercialized a high-altitude long-endurance (i.e., a “HALE”) airship that could perform station-keeping (i.e., stay in one commanded location) for an extended period of time – the energy cost was just too large. And heavier-than-air solar-powered aircraft, such as the Solar Impulse, Zephyr, and Helios, were intriguing but costly, fragile, and unsuited to tactical operations (in my opinion). The problem seemed to be intractable for early 21st-century engineering.
Then, I learned about an amazing weather pattern – the stratospheric quasi-biennial oscillation (“QBO”). This meteorological term does not exactly roll off the tongue, but it describes a remarkable pattern of wind streams going in opposite directions, east versus west, at different altitudes in the stratosphere near the equator. The name refers to the fact that it switches directions, and back again, roughly every two years. It occurred to me that two airships at different altitudes with countervailing winds, connected by a long tether, might be able to equalize their respective drag forces and remain stationary with respect to the ground – at least near the equator – with essentially no energy cost and with relatively simple control algorithms.
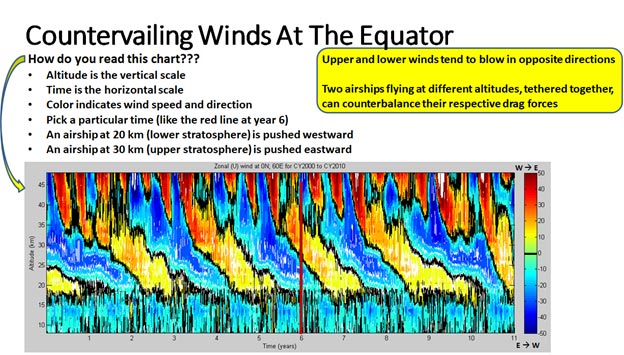
The figure below, “Countervailing Winds At The Equator,” illustrates the quasi-biennial oscillation over a decade in the Indian Ocean, and how it can be finessed to support station-keeping with minimal energy cost (note: this data was provided by NASA/MERRA). Time runs on the horizontal axis (from January 2000 through December 2010) and altitude is on the vertical axis. For reference, the stratosphere starts at an altitude of roughly 20 km. In the figure, color indicates wind direction and speed in meters/second; “cool” colors blow east-to-west and “hot” colors blow west-to-east. A vertical line (such as the red line at year 6) represents an instant of time. As can be seen, at almost any instant of time, an easterly at 20 km altitude (for example) is matched with a westerly above, and vice versa.
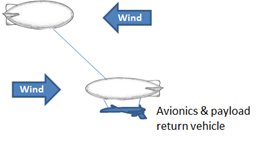
In the concept I developed, a relatively complex payload-carrying airship, designed to operate in the lower stratosphere (i.e., at an altitude of roughly 19-20 km), is tethered to a relatively simple “upper airship” that carries the tether and operates over a range of altitudes. The primary purpose of the upper airship is to create an equal and opposite drag force, negating the effect of wind on the lower airship. Active control is needed to adjust the altitude separation and drag forces – but this is easier than trying to station-keep with a single balloon. The system as a whole is neutrally buoyant at its equilibrium float altitude (obviously), but the upper airship is positively buoyant relative to its own weight and that of the tether. This tends to keep the tether more-or-less vertical. The altitude of the upper airship is controlled by the length of the tether – and tether length is set by the operation of a winch on the lower airship. Aerodynamic control surfaces allow for both airships to adjust their angle of attack, and angle of side slip, for further control of induced drag. Parachutes and parafoils can also be added for additional control of drag and lift, although this adds complexity and is not strictly required in most scenarios.
While the altitude of the upper airship can change by 10 km or more over time, these altitude changes are easier to manage than similar changes for a traditional free balloon – in my tethered system, the altitude is controlled by the length of the tether instead of the absolute buoyancy of the upper balloon. Surprisingly, the altitude of the lower airship does not change very much despite large changes in the altitude of the upper airship, and the relatively larger mass of the lower airship eliminates the risk of runaway buoyancy.
The upper airship must be constructed with at least two chambers or ballonets – one for a lifting gas such as hydrogen or helium, and the other for atmospheric gases. At its maximum design altitude, the lifting gas will expand to nearly fill the entire pressure hull, and the chamber with atmospheric gas is essentially empty. At any lower altitude, the chamber of the lifting gas is reduced in volume and the chamber of atmospheric gas is filled in order to maintain proper aerodynamic shape of the airship. A slight overpressure is needed – a few percent – which can be achieved without a pump because the airship can be made to act like a “wind sock” against the prevailing wind (the airship can also be brought to a slightly lower altitude, temporarily, in order to “fill up”). The excess weight of the atmospheric gas, associated with the overpressure requirement, is less then the weight of the tether spooled on the lower airship. So the upper airship and its burden of the remaining unspooled tether is always positively buoyant.
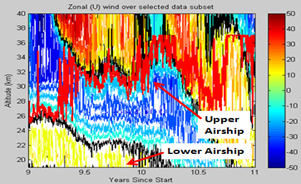
The figure below shows a detail of the last two years of weather data from the figure above, along with altitude data for a simulated tethered airship where the lower airship is operated at an altitude of roughly 19 km (at the bottom of the graph) and the altitude of the upper airship is varied between 25 and 37 km to minimize east-west drift for the system as a whole. This allows for station-keeping with minimal energy consumption. Simulation data show that the drag can be equalized perfectly, or nearly perfectly, the majority of the time – and a small “putt-putt” motor can compensate for residual drift when drag forces on the two airships cannot be perfectly compensated. The two-year period illustrated here captures the worst-case time interval from an energy consumption standpoint, for station-keeping in the Indian Ocean, over the entire eleven-year period examined. Note: for realism, the simulated control system was only allowed to adjust the altitude of the upper airship once every six hours, based on data realistically available at that time (not in the future).
How Precise Can the Drag Compensation Be?
The figure below illustrates the benefit of a tethered airship in terms of propulsion energy cost. Here, the red trace is a simulation based on an optimized “traditional airship” as designed under a NASA study completed in 2007. For a traditional airship, such as the one designed by NASA, the propulsion energy costs scales as the cube of wind speed. Thus, when wind speeds are elevated (for example, from year 10.4 to 10.8), the energy cost to perform station-keeping is very high. This translates into large propulsion and energy systems, which are heavy and add to the overall size and weight and cost of the airship.
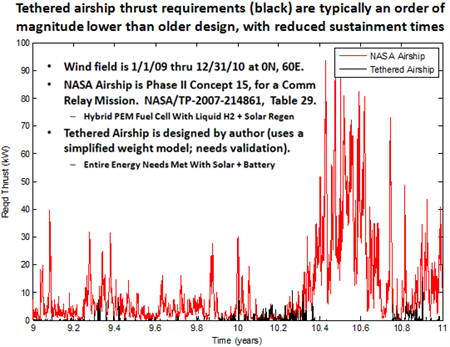
In contrast, the black trace is the propulsion energy cost for a tethered airship operated in the same wind field. When wind speed at 19-20 km altitude is high (e.g., years 10.4 through 10.8), it is relatively easy to find wind running in the opposite direction, at a higher altitude between 25 and 37 km, to compensate. In fact, for the historical wind data, perfect drag compensation was possible, without any propulsion cost whatsoever (beyond the cost of changing the altitude of the upper airship) during the period of worst-case wind for the traditional airship. In contrast, during periods of light or zero wind at 19-20 km altitude, there may be times when a small “putt-putt” motor is needed to compensate for light winds impinging on the upper airship. This is a great engineering trade-off – the tethered airship converts a “peak wind” problem (proportional to the cube of wind speed) to a “minimum wind” problem that can be solved with a tiny motor.
Another nice feature of the tethered airship, compared to a traditional airship, is reduced sustainment time for periods of high thrust. For example, in the scenario above, the traditional airship needed to maintain high levels of thrust for several months. This has a bearing on the size of batteries or other energy storage systems that might be required. In contrast, the tethered airship could be operated with a relatively small solar array and battery system.
The stratospheric quasi-biennial oscillation only exists near the equator, so long-term station-keeping is only possible in that region. But with augmentations, the tethered airship concept offers the potential for world-wide maneuvering with minimal energy cost. By adjusting drag on one or both airships, the system offers an ability to maneuver east-west (or more generally, roughly parallel to the net wind). And by adjusting the bank angle of auxiliary parafoils, north-south maneuvering and “loop trajectories” north and south of the equator can also be achieved.
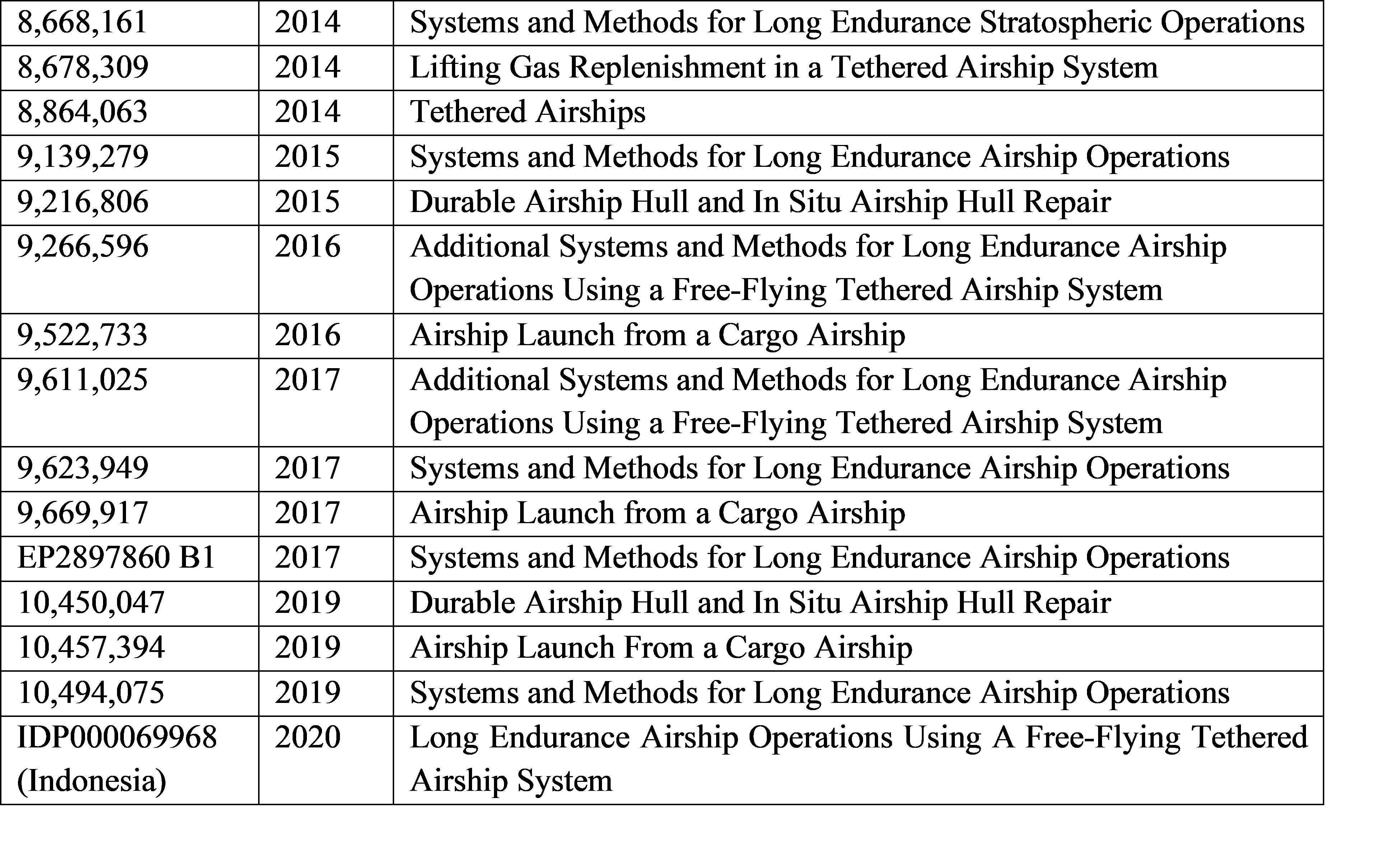
Developing the tethered airship concept was very gratifying, and it led me to consider many other interesting engineering problems such as in situ gas replenishment, stratospheric repair of flimsy structures, deployment strategies, airship hull design, payload management and swap-out, and safe return of payloads to the ground. I was able to capture some of my thoughts on these topics in a range of patents awarded from 2014 through 2020 – see below.
Unfortunately, while a tethered airship is theoretically superior to a traditional airship for station-keeping and hosting of large payloads in the stratosphere, it is still only barely within our current engineering capabilities. All the elements have been demonstrated separately by various teams – large stratospheric balloons, large airships, long tethers – but no one has ever put these pieces together to assemble and test a tethered airship as described here. Surprisingly, the technology driver is the tether, which would weigh on the order of 500 kg (more than 1000 pounds) with current materials. While the tether is easy to build using current materials, its weight drives up the size of the upper airship. This makes the overall system expensive and risky. A tether made of carbon nanotubes would weigh substantially less, allowing the upper airship to be smaller and lower risk. This would reduce the cost and risk of the overall system.
We’ll have to wait and see what the future will bring, in the way of carbon nanotubes.

In Memoriam: Stephen B. Heppe, DSc
Steve was one of our beloved Exclusive Experts for over a decade. He loved working with and through Round Table Group and sent all his cases to be managed by RTG. All of us at Round Table Group will miss him.
Dr. Heppe had over 40 years of experience in the area of telecommunications, electrical engineering, radio/radar, unmanned aircraft, and GPS/GNSS with General Electric Space Division, Stanford Telecommunications, Telenergy, Insitu/Boeing, and independent consultancies.
Find more posts like this:
Exclusive ExpertsOur aerospace, aeronautics and aviation expert witnesses, speakers, and consultants are scholars, researchers, and professionals with extensive knowledge in a broad array of disciplines including engineering, materials, systems, failure analysis, and safety. Topics of interest and areas of expertise include but are not limited to aviation, aircraft engineering and design, propulsion, performance, flight dynamics, flight systems, simulations, aircraft failures and accident investigations, and more.
Approximately 100,000 flights are scheduled every day around the world, as well as a number of military, cargo, and air taxi flights. This totals somewhere around 300,000 worldwide daily flights. Our aviation experts have substantive experience working in flight operation, accident investigation, flight training, insurance, and dealing with FAA regulations. These experts have worked at forensic engineering firms, aviation consulting firms, aviation security firms, and in the air force.
Our communications expert witnesses, speakers, and consultants are scholars and researchers from major universities and industry professionals who have worked many years in the television, radio, and newspaper industries and consulted with organizations such as McDonnell Douglas, Merrill Lynch, Paramount Pictures, Fiat, Cracker Barrel, Xerox, and Eastman Kodak. They are experienced expert witnesses, frequent speakers at numerous state and national professional conferences, authors of numerous scholarly articles and books, as well as political campaign consultants.
Mechanical Engineering is the branch of engineering that studies objects and systems in motion. It applies Engineering standards and problem-solving techniques of engineering.